|
ГЛАВНАЯ
> Вернуться к содержанию
Программные системы и вычислительные методы
Правильная ссылка на статью:
Варепо Л.Г., Хомченко В.Г., Глухов В.И., Притыкин Ф.Н., Кривохатько Е.А.
Геометрическое моделирование шарнирных механизмов третьего класса цикловых машин-автоматов для перемещения рабочих органов с приближенными остановками в двух крайних положениях
// Программные системы и вычислительные методы.
2017. № 2.
С. 67-75.
DOI: 10.7256/2454-0714.2017.2.22719 URL: https://nbpublish.com/library_read_article.php?id=22719
Геометрическое моделирование шарнирных механизмов третьего класса цикловых машин-автоматов для перемещения рабочих органов с приближенными остановками в двух крайних положениях
Варепо Лариса Григорьевна
доктор технических наук
профессор, ФГБОУ ВО «Омский государственный технический университет»
644050, Россия, Омская область, г. Омск, проспект Мира, 11
Varepo Larisa
Doctor of Technical Science
Professor, Omsk State Technical University
644050, Russia, Omskaya oblast', g. Omsk, prospekt Mira, 11

|
larisavarepo@yandex.ru
|
|
 |
Другие публикации этого автора
|
|
Хомченко Василий Герасимович
доктор технических наук
профессор, ФГБОУ ВО «Омский государственный технический университет»
644050, Россия, г. Омск, пр. Мира, 11
Khomchenko Vasilii Gerasimovich
Doctor of Technical Science
Professor, Department of Automation and Robotics, Omsk State Technical University
644050, Russia, g. Omsk, pr. Mira, 11
|
|
v_khomchenko@mail.ru
|
|
|
Другие публикации этого автора
|
|
Глухов Владимир Иванович
доктор технических наук
профессор, ФГБОУ ВО «Омский государственный технический университет»
644050, Россия, г. Омск, пр. Мира, 11
Glukhov Vladimir Ivanovich
Doctor of Technical Science
Professor, Department of Oil and Gas, Standardization and Metrology, Omsk State Technical University
644050, Russia, g. Omsk, pr.Mira, 11
|
|
mips@omgtu.ru
|
|
|
Другие публикации этого автора
|
|
Притыкин Федор Николаевич
доктор технических наук
профессор, ФГБОУ ВО «Омский государственный технический университет»
644050, Россия, г. Омск, пр. Мира, 11
Pritykin Fedor Nikolaevich
Doctor of Technical Science
Professor, Department of Engineering Geometry and CAD, Omsk State Technical University
644050, Russia, g. Omsk, pr. Mira, 11
|
|
pritykin@mail.ru
|
|
|
Другие публикации этого автора
|
|
|
Кривохатько Екатерина Александровна
ассистент, ФГБОУ ВО «Омский государственный технический университет»
644050, Россия, г. Омск, пр. Мира, 11
Krivokhat'ko Ekaterina Aleksandrovna
Assistant, Omsk State Technical University
644050, Russia, g. Omsk, pr. Mira, 11
|
|
katusa23@mail.ru
|
|
|
|
DOI: 10.7256/2454-0714.2017.2.22719
Дата направления статьи в редакцию:
18-04-2017
Дата публикации:
19-06-2017
Аннотация:
Объектом исследования являются шарнирные рычажные механизмы, основанные на использовании структурных групп третьего класса третьего порядка по классификации Ассура-Артоболевского. Названные механизмы исследуются и проектируются в качестве исполнительных устройств цикловых высокопроизводи-тельных машин-автоматов. Из множества рычажных механизмов третьего класса в качестве предмета исследования выделены так называемые пределообразующие ме-ханизмы, позволяющие получать приближенные выстои выходного звена, а, следо-вательно, и рабочего органа за счет использования предельных положений рычаж-ных диад. Рассмотрены шарнирные рычажные механизмы третьего класса, которые в силу своих кинематических особенностей дают возможность обеспечивать при-ближенные выстои выходного звена в обоих его крайних положениях в соответствии с наперед заданной циклограммой работы машины-автомата. Для исследования шарнирных механизмов с приближенными остановками выходного звена в двух крайних положениях по заданной циклограмме применяли метод конструктивного геометрического моделирования как основы для разработки аналитической геометрической модели рассматриваемых механизмов На основе конструктивного геометрического моделирования предложен метод проектирования шестизвенных механизмов третьего класса с двумя приближенными остановками выходного звена в крайних положениях по наперед заданной циклограмме. Выявлены возможные ветвления кинематической схемы данного механизма. Создана аналитическая геометрическая модель синтеза шестизвенных шарнирных механизмов третьего класса как исполнительных устройств высокопроизводительных машин-автоматов полиграфической, пищевой, текстильной и ряда других отраслей промышленности.
Ключевые слова:
геометрическое моделирование, шарнирный механизм, геометрическое построение, выстои, свободные параметры, чебышевское приближение, рабочий орган, кинематическая схема, ветвление, циклограмма
УДК: 004.94:531.8
Abstract: The objects of the study are articulated lever mechanisms based on the use of third-order third-class structural groups by the Assur-Artobolevsky classification. These mechanisms are studied and designed as actuators of high-performance machines. Of the many lever mechanisms of the third class, the so-called limit-forming mechanisms are singled out to become the object of studies, making it possible to obtain approximate outgrade of the output link, and, consequently, of the working tool by using the limit positions of the lever diads. The third class articulated lever mechanisms of the third class are being analyze, due to their kinematic features these mechanisms allow to provide approximate out-riggers of the output link in both its extreme positions in accordance with the preassigned operating schedule of the machine.The method of the study of hinged mechanisms with approximate stops of the out-put link in the two extreme positions according to the given cyclogram is the method of constructive geometric modeling as the basis for the development of an analytical geomet-ric model of the mechanisms under consideration. Based upon the constructive geometric modeling the authors propose the method for designing six-link mechanisms of the third class with two approximate stops of the output link in the extreme positions according to the preassigned cyclogram. Possible branching of the kinematic scheme of this mechanism is revealed. An analytical geometric model for the synthesis of six-link hinged mechanisms of the third class as executive devices for high-performance machines for printing, food, textile and a number of other industries has been created by the authors.
Keywords: cyclogram, branching, geometric construction, working body, Chebyshev approximation, free parameters, dwells, kinematic scheme, hinged mechanism, Geometric modeling
Введение
В цикловых машинах-автоматах высокой производительности в качестве исполнительных механизмов нашли широкое применение рычажные механизмы [1- 7]. Однако, как правило, они используются для реализации циклограмм, в которых рабочий орган, совершая возвратно-вращательные или возвратно-поступательные движения, в крайних положениях имеет мгновенные остановки [4]. Если же требуется перемещать рабочий орган с остановками в одном или в двух крайних положениях, то предпочтение отдается кулачковым механизмам, несмотря на ряд их существенных недостатков, ограничивающих работу цикловых машин-автоматов на высоких скоростях.
В последние десятилетия в качестве альтернативы кулачковым механизмам достаточно активно ведутся разработки рычажных механизмов, обеспечивающих рабочему органу приближенные выстои конечной продолжительности, как в одном, так и в двух крайних положениях [1, 3-7]. Это связано с более высокой нагрузочной способностью рычажных механизмов и простым решением проблемы неразрывности кинематических цепей по сравнению с кулачковыми механизмами.
С помощью рычажных механизмов наиболее просто реализуются циклограммы с выстоем в одном из крайних положений. Для этого достаточно использовать шестизвенные механизмы второго класса по классификации Ассура-Артоболевского, в которых исходный четырехзвенник представляет собой либо направляющий механизм[8], либо выполняет роль распределения углов поворота кривошипа на заданные циклограммой углы прямого и обратного хода и углы выстоя [1]. Присоединяемые рычажные диады проектируются и в том и в другом случаях по условию организации приближенной остановки выходного звена механизма с требуемой точностью.
Основой синтеза рычажных механизмов, в том числе и рычажных механизмов с выстоем выходного звена в одном и/или двух крайних положениях, на протяжении длительного времени, являются, как правило, методы геометрического моделирования [9-15]. Это связано с тем, что методы геометрического моделирования являются наиболее подходящим аппаратом для визуального выстраивания логики получения рассматриваемых механизмов с требуемыми функциональными возможностями.
В данной работе процесс проектирования шарнирных механизмов третьего класса с приближенными остановками выходного звена в двух крайних положениях сводится, по сути, к последовательному геометрическому синтезу механизма от известных характерных положений входного звена механизма к требуемым по циклограмме машины-автомата положениям выходного.
Постановка задачи
Обеспечение остановок выходного звена в двух крайних положениях рычажными механизмами при использовании шатунных кривых требует поиска подходящих четырехзвенных механизмов в достаточно ограниченной области и с весьма ограниченными возможностями [8]. В случае использования для получения выстоев предельных положений механизма обычно применяют восьмизвенные механизмы второго класса с последовательным присоединением рычажных диад [1].
Во второй половине прошлого века немецкий ученый К. Хайн [4] впервые предложил кинематическую схему шестизвенного механизма третьего класса, позволяющую получать выстои рабочего органа конечной продолжительности в двух крайних положениях. В результате появилась возможность для получения выстоев в двух крайних положениях использовать более простые рычажные механизмы с шестью звеньями. Однако метод, предложенный К. Хайном, обеспечивал выстои в периоды, не согласованные с требуемой циклограммой машины-автомата, что приводило к необходимости корректировать по возможности циклограмму и, следовательно, работу других исполнительных органов, что естественно ограничивало применение таких механизмов в инженерной практике, несмотря на их потенциальные возможности.
В работах [1,3,5-7] был предложен аналитический метод синтеза таких шестизвенных рычажных механизмов третьего класса по наперед заданной циклограмме с выстоями рабочего органа в двух крайних положениях применительно к одной из модификаций этого механизма. При синтезе рычажных механизмов наряду с аналитическими методами [1, 3-8] широко используются геометрическое моделирование [9-15].
В данной работе предлагается подход к проектированию шестизвенных механизмов третьего класса с двумя приближенными остановками выходного звена в крайних положениях наперед по заданной циклограмме с выявлением возможных ветвлений кинематической схемы данного механизма на основе конструктивного метода геометрического моделирования.
Метод решения
Построение геометрической модели рассматриваемого механизма (рисунок) начинается с вычерчивания траектории (окружности) точки B кривошипа AB единичной длины и определения на ней (на траектории) положений B0, B1, B2 и B3 этой точки при повороте кривошипа на углы φ1, φB1, φ2 и φB2, соответственно за интервалы прямого хода рабочего органа, первого выстоя, обратного хода и второго выстоя.
Для обеспечения равномерного чебышевского приближения (наименее уклоняющегося от нуля) на интервалах выстоев шатунная тачка E в начале и конце каждого из этих выстоев должна находиться в одних и тех же положениях. Это обеспечивается при расположении названных точек на биссектрисах ν0ν0 и ν1ν1 углов φB2 и φB1 соответственно. Назначив относительную длину шатуна BE, равной b, отметим на биссектрисах ν0ν0 и ν1ν1 точки E0 и E1.
Следующим этапом геометрического моделирования механизма является проектирование треугольного звена ECF и назначение его положения в моменты начала и конца выстоев в крайних положениях рабочего органа. Примем относительные длины сторон ECи CF этого звена, равными e и f, а угол между ними, равным η. Расположим это звено вначале и конце выстоев под углами χ0 и χ1 (рисунок) по отношению к биссектрисам ν0ν0и ν1ν1 соответственно.
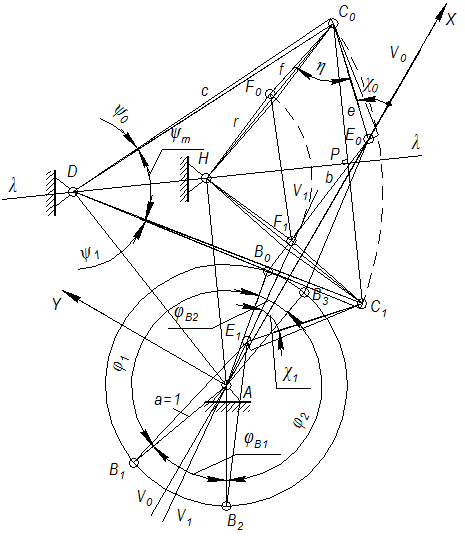
Рисунок – Геометрическая модель кинематической схемы шарнирного механизма третьего класса с приближенным выстоем в двух крайних положениях
В результате получим фиксированные положения C0,C1 и F0, F1 точек C и Fсоответственно в моменты начала и конца выстоев, которые одновременно являются центрами шарниров выходного звена DC, жестко соединенным с рабочим органом, и вспомогательного звена HF.
Центр неподвижного шарнира Dвыходного звена DC должен находиться на перпендикуляре λλ, проведенном из середины Pотрезка (хорды) C0C1, соединяющего положения C0 и C1 подвижного шарнира Cв начале и конце выстоев. Воспользовавшись заданным углом ψm размаха выходного звена DC, найдем известным способом положение шарнира D на перпендикуляре λλ и, следовательно, относительную длину с этого звена. Аналогичным образом определим положение центра неподвижного шарнира H вспомогательного звена HF, используя отрезок F0F1 и назначив длину r этого звена.
После того как найдены положения центров шарниров D и H, становятся известными межцентровые расстояния AD и AHспроектированного механизма в относительных единицах.
В результате такого геометрического построения обеспечено выполнение заданной циклограммы (углы φ1, φB1, φ2 и φB2) и требуемое угловое перемещение выходного звена механизма (угол ψm), что позволяет считать синтез механизма на уровне геометрического моделирования завершенным.
Отметим, что в периоды выстоев выходное звено DCсовершает малые колебания на углы ψ0 и ψ1, характеризующие точность позиционирования рабочего органа в эти периоды, а, следовательно, и точность выполнения требуемой технологической операции.
Минимизация углов ψ0 и ψ1 является одной из основных задач синтеза рассматриваемых механизмов. Для этого разработаем необходимую аналитическую геометрическую модель шестизвенного шарнирного механизма третьего класса.
Аналитические зависимости, необходимые для синтеза рассматриваемых механизмов и расчета углов ψ0 и ψ1, получим в системе координат AXY (рисунок) путем последовательного вычисления координат центров шарнировE, C, F, Dи H в их характерных положениях в соответствии с исходными данными.
Математические выражения для расчета углов ψ0 и ψ1 имеют следующий вид:


где: 
 ; ;

















 . .
Полученные формулы для расчета отклонений выходного звена от положения выстоя в общем виде можно представить следующим образом:
ψ0 = ψ0(ψm,φ1, φB1, φ2, b, e, f,r, η,χ0, χ1);
ψ1= ψ1(ψm,φ1, φB1, φ2, b, e, f,r, η,χ0, χ1).
Отметим, что в ходе оптимизационного синтеза как из условия минимизации углов ψ0 и ψ1 , так и по тем или иным другим критериям параметры ψm, φ1, φB1, φ2 остаются неизменными, а свободными параметрами являются b, e, f, r, η, χ0, χ1.
Укажем возможные направления ветвления схемы проектируемого механизма, позволяющие получить его дополнительные модификации. Первые четыре основные модификации возникают при расположении центров D и H с различных сторон отрезков C0C1 и F0F1. Еще четыре вариации механизма получаются за счет направления, в котором откладываются углы χ0 и χ1относительно биссектрис ν0ν0 и ν1ν1– по часовой стрелке или против. Указанные вариации механизма следует тоже отнести к модификациям, так как углы χ0 и χ1 можно менять непрерывно лишь в изолированных друг от друга допустимых областях. Таким образом, общее число модификаций рассматриваемого механизма равно шестнадцати.
Заключение
Полученная путем конструктивного геометрического моделирования схема шарнирного шестизвенного механизма позволила создать аналитическую геометрической модель шестизвенного шарнирного механизма третьего класса и получить в итоге математическую модель синтеза таких механизмов.Установлены свободные параметры синтеза шарнирного шестизвенного механизма: относительные длины b, e, fи r звеньев BE, ECF и HF, угол η между сторонами EC и CF звена ECF и углы χ0 и χ1, определяющие положение этого звена относительно биссектрис ν0ν0 и ν1ν1 в начале и конце интервалов выстоев. В последующем эти параметры могут быть использованы для поиска оптимальных по тем или иным критериям механизмов при заданной углами φ1, φB1, φ2циклограмме движения рабочего органа и заданной величине ψmего углового перемещения за интервалы движения. В частности, одними из важнейших задач синтеза рассматриваемых механизмов является повышение точности выстоя выходного звена (минимизация углов ψ0 и ψ1).
Библиография
1. Хомченко, В. Г. Проектирование плоских рычажных механизмов цикловых машин-автоматов и манипуляторов. – Омск: Изд-во ОмГТУ. 1995. – 152 с.
2. Надеждин, И. В. Проектирование рычажных механизмов цикловых машин-автоматов. – М.: Машиностроение. – 2010. – 232 с.
3. Хомченко, В. Г. Аналитический синтез шестизвенного механизма третьего класса с двумя остановками выходного звена по заданной циклограмме // Теория механизмов и машин. – Харьков. 1986. Вып. 41. С. 48-52.
4. Hain K. Sechsgliedriges Koppelgetriebenutzt Totlagenauszum Erzeugen von Endrasten // Maschinenmarkt. – 1981, 87. N 96. S. 2094-2097.
5. Хомченко, В. Г. Графический и аналитический методы синтеза шестизвенного шарнирного механизма третьего класса с приближенным выстоем выходного звена в крайнем положении по заданной циклограмме / Омск.политехн. ин-т. – Омск, 1991. 7 с. Деп в ВИНИТИ 11.06.91, № 2460-В91.
6. Синтез рычажных механизмов третьего класса с регулируемым выстоем из условия минимизации отклонения угла асимметрии / В.Г. Хомченко, В.А. Бакшеев, В.С. Хо-рунжин, Н.Г. Скабкин / Механика процессов и машин: Сб. науч. тр. / Под ред. В. В. Евстифеева. Омск: Из-во ОмГТУ, 2002. С. 8-17.
7. Синтез шестизвенных рычажных механизмов 3-го класса как генераторов заданного семейства циклограмм / В.Г. Хомченко, В.А. Бакшеев, В.С. Хорунжин, Н.Г. Скабкин / Динамика систем, машин и механизмов: Материалы IV Междунар. науч.-техн. конф., посвященной 60-летию ОмГТУ. Омск: Изд-во ОмГТУ,2002. Кн.1. С.111-113.
8. Пейсах, Э. Е. Система проектирования плоских рычажных механизмов / Э. Е. Пейсах, В. А. Нестеров, К. В. Фролов. – М.: Машиностроение. 1988 . – 230 с.
9. Геронимус, Я. Л. Геометрический аппарат теории синтеза плоских механизмов. М.: Гос. изд-во физ.-мат. литер., 1962. – 400 с.
10. Головин, А.А. и др. Кинематический анализ рычажных механизмов методами геометрии комплексной плоскости и сплайн-аппроксимации //Изв. вузов. Машиностроение. 1987. – № 1. – С.28-33.
11. Овакимов, А.Г. Погруппный векторный метод решения задач кинематики плоских механизмов (1.Задача о положениях) //Изв. вузов. Сер. Машиностроение. 1975. № 6. – С. 52-56.
12. Озол, О.Г. Аналитический метод треугольников в кинематике плоских механизмов //Анализ и синтез механизмов. – М.: Машиностроение. 1966. – С. 128-144.
13. Пустыльник, Г.М. О геометрическом моделировании кинематики многозвенников //Теория механизмов и машин. 1987. №42. – С. 66-72.
14. Романцев, А.А. Решение задач о перемещениях звеньев плоской кинематической це-пи, представленной в виде геометрической системы / А.А. Романцев, Н.С. Мошкова //Докл. АН Узб.ССР. 1983. – Т. II. – С. 12-16.
15. Синченко, Л.Д. Некоторые вопросы геометрии четырехзвенных механизмов с вращательными парами //Тр. /ЛИТМО. – Л., 1974. – Вып.77.– С. 20-26.
References
1. Khomchenko, V. G. Proektirovanie ploskikh rychazhnykh mekhanizmov tsiklovykh mashin-avtomatov i manipulyatorov. – Omsk: Izd-vo OmGTU. 1995. – 152 s.
2. Nadezhdin, I. V. Proektirovanie rychazhnykh mekhanizmov tsiklovykh mashin-avtomatov. – M.: Mashinostroenie. – 2010. – 232 s.
3. Khomchenko, V. G. Analiticheskii sintez shestizvennogo mekhanizma tret'ego klassa s dvumya ostanovkami vykhodnogo zvena po zadannoi tsiklogramme // Teoriya mekhanizmov i mashin. – Khar'kov. 1986. Vyp. 41. S. 48-52.
4. Hain K. Sechsgliedriges Koppelgetriebenutzt Totlagenauszum Erzeugen von Endrasten // Maschinenmarkt. – 1981, 87. N 96. S. 2094-2097.
5. Khomchenko, V. G. Graficheskii i analiticheskii metody sinteza shestizvennogo sharnirnogo mekhanizma tret'ego klassa s priblizhennym vystoem vykhodnogo zvena v krainem polozhenii po zadannoi tsiklogramme / Omsk.politekhn. in-t. – Omsk, 1991. 7 s. Dep v VINITI 11.06.91, № 2460-V91.
6. Sintez rychazhnykh mekhanizmov tret'ego klassa s reguliruemym vystoem iz usloviya minimizatsii otkloneniya ugla asimmetrii / V.G. Khomchenko, V.A. Baksheev, V.S. Kho-runzhin, N.G. Skabkin / Mekhanika protsessov i mashin: Sb. nauch. tr. / Pod red. V. V. Evstifeeva. Omsk: Iz-vo OmGTU, 2002. S. 8-17.
7. Sintez shestizvennykh rychazhnykh mekhanizmov 3-go klassa kak generatorov zadannogo semeistva tsiklogramm / V.G. Khomchenko, V.A. Baksheev, V.S. Khorunzhin, N.G. Skabkin / Dinamika sistem, mashin i mekhanizmov: Materialy IV Mezhdunar. nauch.-tekhn. konf., posvyashchennoi 60-letiyu OmGTU. Omsk: Izd-vo OmGTU,2002. Kn.1. S.111-113.
8. Peisakh, E. E. Sistema proektirovaniya ploskikh rychazhnykh mekhanizmov / E. E. Peisakh, V. A. Nesterov, K. V. Frolov. – M.: Mashinostroenie. 1988 . – 230 s.
9. Geronimus, Ya. L. Geometricheskii apparat teorii sinteza ploskikh mekhanizmov. M.: Gos. izd-vo fiz.-mat. liter., 1962. – 400 s.
10. Golovin, A.A. i dr. Kinematicheskii analiz rychazhnykh mekhanizmov metodami geometrii kompleksnoi ploskosti i splain-approksimatsii //Izv. vuzov. Mashinostroenie. 1987. – № 1. – S.28-33.
11. Ovakimov, A.G. Pogruppnyi vektornyi metod resheniya zadach kinematiki ploskikh mekhanizmov (1.Zadacha o polozheniyakh) //Izv. vuzov. Ser. Mashinostroenie. 1975. № 6. – S. 52-56.
12. Ozol, O.G. Analiticheskii metod treugol'nikov v kinematike ploskikh mekhanizmov //Analiz i sintez mekhanizmov. – M.: Mashinostroenie. 1966. – S. 128-144.
13. Pustyl'nik, G.M. O geometricheskom modelirovanii kinematiki mnogozvennikov //Teoriya mekhanizmov i mashin. 1987. №42. – S. 66-72.
14. Romantsev, A.A. Reshenie zadach o peremeshcheniyakh zven'ev ploskoi kinematicheskoi tse-pi, predstavlennoi v vide geometricheskoi sistemy / A.A. Romantsev, N.S. Moshkova //Dokl. AN Uzb.SSR. 1983. – T. II. – S. 12-16.
15. Sinchenko, L.D. Nekotorye voprosy geometrii chetyrekhzvennykh mekhanizmov s vrashchatel'nymi parami //Tr. /LITMO. – L., 1974. – Vyp.77.– S. 20-26.
Ссылка на эту статью
Просто выделите и скопируйте ссылку на эту статью в буфер обмена. Вы можете также
попробовать найти похожие
статьи
|
|




