|
Программные системы и вычислительные методы
Правильная ссылка на статью:
Амосов А.Г.
Алгоритм построения геометрии движения специальных транспортных средств
// Программные системы и вычислительные методы.
2019. № 4.
С. 20-29.
DOI: 10.7256/2454-0714.2019.4.30842 URL: https://nbpublish.com/library_read_article.php?id=30842
Алгоритм построения геометрии движения специальных транспортных средств
Амосов Алексей Германович
кандидат технических наук
Ассистент кафедры "Инженерная графика", федеральное государственное бюджетное образовательное учреждение высшего образования «Московский авиационный институт (национальный исследовательский университет)»
109380, Россия, г. Москва, ул. Головачева, 3, кв. 50
Amosov Aleksei Germanovich
PhD in Technical Science
Assistant of the Department №904, Moscow Aviation Institute
109380, Russia, g. Moscow, ul. Golovacheva, 3, kv. 50

|
lamosov@yandex.ru
|
|
 |
|
DOI: 10.7256/2454-0714.2019.4.30842
Дата направления статьи в редакцию:
19-09-2019
Дата публикации:
28-09-2019
Аннотация:
Рассмотрена актуальная на сегодняшний день проблема отсутствия алгоритма построения движения специальных транспортных средств. Целью исследовательской работы является разработка программного комплекса для расчета поворота многозвенного специального транспортного средства, с учетом алгоритма описывающего характерные особенности движения специальных транспортных средств. Повышение габаритов и массы длинномерных грузов обуславливает необходимость создания новых конструкций специальных транспортных средств, отличительной особенностью которых является многозвенность и длиннобазность, что в свою очередь понижает маневренность и требует учета особенностей движения по кривой. Для исследования процесса движения специальных транспортных средств применялся метод геометрического моделирования для разработки аналитической геометрической модели поворота тягача и полуприцепа. На основе геометрического моделирования разработан метод определения характеристик поворота многозвенного транспортного средства. Показано что, проходимость специальных транспортных средств является не менее важным качеством по сравнению с долговечностью, закон изменения соотношения углов поворота управляемых колес, различных осей должен обеспечивать максимальный поворачивающий момент при максимальных углах поворота передних управляемых колес, а также должен обеспечивать равенство износа при незначительных углах.
Ключевые слова:
алгоритм, моделирование криволинейного движения, автоматизация, программный комплекс, геометрические характеристики, траектория движения, специальные транспортные средства, угол поворота, блок-схема, процесс
Abstract: The current problem of the lack of an algorithm for constructing the movement of special vehicles is considered in the paper. The aim of the research is to develop a software package for calculating the rotation of a multi-link special vehicle, taking into account an algorithm that describes the characteristic features of the movement of special vehicles.An increase in the dimensions and mass of long cargoes necessitates the creation of new designs of special vehicles, the distinguishing feature of which is multi-linkage and long-wheelbase, which in turn reduces maneuverability and requires taking into account the peculiarities of movement along a curve.To study the process of moving special vehicles, a geometric modeling method was used to develop an analytical geometric model for the rotation of the tractor and semitrailer. Based on geometric modeling, a method for determining the turning characteristics of a multi-link vehicle has been developed. It has been shown that patency of special vehicles is no less important in comparison with durability, the law of changing the ratio of steering angles of the steered wheels, different axles should provide the maximum turning moment at the maximum steering angles of the front steered wheels, and should also ensure equality of wear at small angles.
Keywords: algorithm, curvilinear motion simulation, automation, software package, geometrical adjectives, path of motion, special vehicles, rotation angle, flow chart, process
Введение
В процессе разработки алгоритма построения движения специальных транспортных средств выполнены комплексные теоретические исследования [1-3], в которых подверглись анализу: основные концепции, направления развития и назначение специальных транспортных средств [4-6], развитие системных средств в построении геометрии движения агрегатов [7-9], современное состояние метрологического обеспечения специальных транспортных средств, тенденции развития колесных средств. В результате определены пути построения процесса проектирования и разработана общая архитектура движения модели многозвенного специального транспортного средства.
Постановка задачи
Разработка алгоритма геометрического моделирования специальных транспортных средств
Алгоритм построения и визуализации геометрической модели специальных транспортных средств представлен на рис. 1.
На первом уровне представлены в общем виде требования, заложенные в техническом задании. В данном случае процесс проектирования конструкции может рассматриваться как некоторый процесс принятия последовательно уточняемых и детализируемых технических решений, обоснованных соответствующими расчетами, постановкой эксперимента, изготовлением опытного образца и его испытаниями. Выработки схемно-конструктивных решений в соответствии с требованиями технического задания и их конструктивное исполнение являются главным содержанием процесса проектирования.
Исходными данными для проектирования являются:
– внешняя нагрузка, поставленная в виде ускорений, скоростей, перемещений, как функций от времени;
– параметры характеризующие прочностные свойства: перегрузка, усилия в характерных сечениях, моменты;
– компоновка, то есть пространство, отведенное для размещения конструкции и геометрические ограничения.
На втором уровне проводится формирование первичного облика, проводится анализ возможных решений и выбираются наиболее целесообразные варианты. При этом устанавливается общий вид конструкции. Положительное решение принимается в том случае, когда становится ясным, что возможно создание конструкции при исходных данных, которые были первоначально выданы, либо скорректированы в допустимых пределах в процессе работы.
На третьем уровне проводится формирование компоновочной схемы, заключающейся в осуществлении взаимной пространственной увязки основных компонуемых элементов. Компоновка происходит на базе выбранной схемы, определённых основных параметров. В процессе компоновки определяются внешняя и внутренняя геометрия, компонуется нагрузка, оборудование, снаряжение, размещаются агрегаты и т. д. Процесс компоновки носит специфический характер в силу особенностей специальных транспортных средств.
На четвёртом уровне проводится расчёт характеристик специальных транспортных средств. По результатам компоновки уже известны основные размеры, формы и массово-инерционные характеристики. Данной информации достаточно для определения:
– прочностных характеристик;
– динамических характеристик;
Исходя из полученных величин, принимается решение о ходе дальнейшего проектирования специальных транспортных средств.
На пятом уровне проводится расчёт характеристик эффективности функционировании. К числу таких характеристик относятся:
– показатели назначения;
– показатели надежности;
– показатели технологичности;
– показатели стандартизации и унификации;
– эргономические показатели;
– эстетические показатели;
– патентно-правовые показатели;
– экономические показатели.
В зависимости от условий и стадии разработки конструкции применяют следующие методы определения показателей:
– экспериментальный – проводится техническими измерительными средствами при специальных испытаниях или эксплуатации изделия по обнаружению и подсчету количества событий.
– расчетный – осуществляется при помощи вычислений по установленным теоретическим или эмпирическим зависимостям с использованием значений и параметров найденными другими методами или заданными.
– экспертный – базируется на мнениях групп специалистов-экспертов.
Шестой уровень является заключительным при формировании компоновки специальных транспортных средств. В случае удовлетворения всех требований внешнего проектирования и отсутствия противоречий на этапах внутреннего проектирования процесс формирования облика специальных транспортных средств должен закончиться техническим предложением, т. е. выпуском чертежей общего вида, компоновки, трёхмерной модели, а также выдачей характеристик и результатов по частным критериям всех уровней.
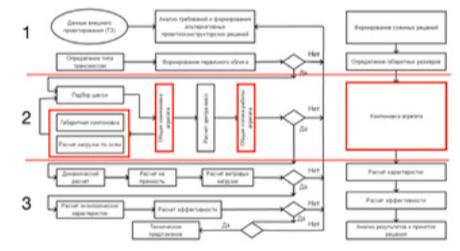
Рисунок 1 -Блок схема процесса проектирования
специальных транспортных средств
Как видно из описания особенностей формирования компоновки специальных транспортных средств, компоновка этого типа машин отличается от компоновки обычных грузовых автомобилей, выбором компоновки специальной части.
Математическая модель движения многозвенного специального транспортного средства
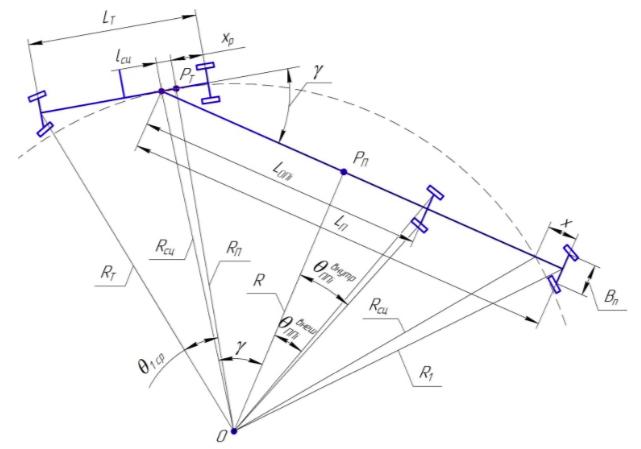
Для определения зависимостей между углами поворота колес звеньев специальных транспортных средств воспользуемся схемой, представленной на рис. 2.
Ширина коридора В– это разность между максимальным R1и минимальным Rрадиусами поворота:
 |
(1)
|
Запишем необходимые геометрические соотношения для определения величины В.
|
 ; ;
|
(2)
|
|
 ; ;
|
(3)
|
Рисунок 2 – Схема поворота специального транспортного средства:
Lт– колесная база тягача; Lп– колесная база полуприцепа; Lопi– расстояние от точки сцепки до i-й оси полуприцепа; О– центр поворота; Рт– полюс поворота тягача; хР– расстояние от задней оси тягача до полюса поворота; lсц– расстояние от вертикальной оси седельно-сцепного устройства до полюса поворота Ртна продольной оси тягача; Рп– полюс поворота полуприцепа; Rсц– радиус поворота точки сцепки; R1– максимальный радиус поворота; Rп– радиус поворота тягача; R– минимальный радиус поворота; γ – угол складывания; Θ1ср– средний угол поворота управляемых колес первой оси тягача; – средний угол поворота управляемых колес i-й оси полуприцепа; x– расстояние от задней оси тягача до точки пересечения его продольной оси с окружностью радиуса Rсц
|
 ; ;
|
(4)
|
|
 . .
|
(5)
|
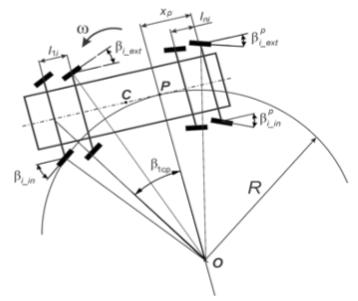
При моделировании криволинейного движения необходимо задавать углы поворота управляемых колес. Будем считать рулевую трапецию идеальной, рассчитывая углы поворота каждого колеса по известным кинематическим зависимостям. Рассмотрим расчетную схему для определения углов поворота колес тягача на рис. 3.
Рисунок 3 – Расчетная схема для определения углов поворота управляемых колес: Р – полюс рулевого управления, С– центр масс, О – мгновенный центр поворота
В качестве задающего сигнала будем использовать средний угол поворота колес передней оси:
 |
(6)
|
Тогда для внешних (по отношению к направлению поворота) управляемых колес i-й оси, расположенной перед полюсом поворота (рис. 3):
 |
(7)
|
Для внутренних (по отношению к направлению поворота) управляемых колес i-й оси, расположенной перед полюсом поворота (рис. 12):
 |
(8)
|
Для внешних (по отношению к направлению поворота) управляемых колес i-й оси, расположенной за полюсом поворота (рис. 3):
 |
(9)
|
Для внутренних (по отношению к направлению поворота) управляемых колес i-й оси, расположенной за полюсом поворота (рис. 3):
 |
(10)
|
В формулах (6–10):
L– база колесной машины;
l1i – расстояние от передней до i-й оси машины;
lni– расстояние от задней до i-й оси машины;
Вk– колея колесной машины;
хр– расстояние от последней оси до полюса поворота Р(рис. 3).
Теперь рассмотрим расчетную схему для определения углов поворота колес полуприцепа на рис. 3.
Угол поворота внутреннего управляемого колеса задней оси полуприцепа определяется по следующему уравнению:
 (11) (11)
где – минимальный радиус поворота специального транспортного средства;
– ширина колеи колес полуприцепа,
x– расстояние между приведенной и задней осями полуприцепа.
Важно понимать, что значение поворота данного колеса не может превышать значение, определяемое конструкцией рулевой трапеции.
Под приведенной осью понимается мнимая ось полуприцепа, по которой рассчитывается минимальный коридор движения всего специального транспортного средства с учетом его внешних габаритов.
Углы поворота управляемых колес полуприцепа:
– для внешнего по отношению к направлению поворота колеса:
 (12) (12)
– для внутреннего по отношению к направлению поворота колеса:
 (13) (13)
Поэтому для описания процесса поворота многозвенного специального транспортного средства необходимо составлять динамическую математическую модель, учитывающую как систему управления, так и явление бокового увода.
Для удобства описания процесса поворота многозвенного специального транспортного средства введем следующие понятия:
– переднее приведенное колесо тягача – вымышленное колесо, условно располагаемое в геометрическом центре переднего колесного хода, угол поворота которого определяется кинематикой рулевого привода этого колесного хода;
– заднее приведенное колесо тягача – вымышленное колесо, условно располагаемое в геометрическое центре заднего колесного хода тягача (чаще всего это колесо неповоротное, в противном случае угол поворота этого колеса определяется кинематикой рулевого привода заднего колесного хода тягача);
– приведенное колесо полуприцепа – вымышленное колесо, условно располагаемое в геометрическом центре колесного хода полуприцепа, угол поворота которого определяется кинематикой рулевого привода колесного хода полуприцепа.
Расчетная схема поворота многозвенного специального транспортного средства приведена на рис. 4.
Уравнения, описывающие процесс поворота многозвенного специального транспортного средства, получены при учете следующих допущений:
– величина вектора скорости заднего приведенного колеса тягача поддерживается постоянной;
– рассматривается плоская велосипедная модель многозвенного специального транспортного средства;
– влияние возмущений, действующих со стороны внешних сил, не учитываются;
– явление бокового увода шин в рассмотрение не принимаются;
– скорость поворота переднего приведенного колеса тягача принимается постоянной.
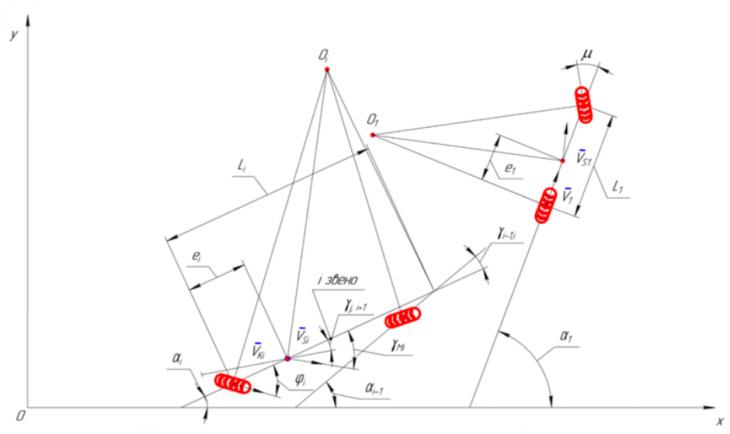
Рисунок 4 – Расчетная схема кинематики поворота плоской велосипедной модели многозвенного специального транспортного средства
Семействомногозвенных специальных транспортных средств, предназначенное для транспортировки длинномерных неделимых грузов массой до 300 т по дорогам Vкатегории (СНиП П-Д.5-72), выполняется по схеме седельных автопоездов, имеющих в своем составе от одного до четырех полуприцепов. Исходя из этого, с учетом алгоритма движения специальных транспортных средств, был разработан программный комплекс, предназначенный для расчета характеристик криволинейного движения многозвенного специального транспортного средства, имеющего в своем составе от одного до четырех полуприцепов. Результатами расчета являются:
– геометрия траектории движения звеньев специального транспортного средства;
– курсовые углы звеньев и скорости их изменения;
– углы складывания, поворота колес и скорости их изменения.
Расчеты проводятся при заданных условиях движения и конструктивных параметрах многозвенного специального транспортного средства.
Программный комплекс позволяет рассчитывать поворот многозвенного специального транспортного средствана любой угол от 0° до 360° (рис. 5). Кроме того, программа позволяет рассчитывать траектории звеньев многозвенного специального транспортного средствапри его движении по дороге, состоящей из произвольного числа (до 50 включительно) дорожных участков с углом поворота тягача на каждом участке не более 180°. Дорожный участок (рис. 5) включает:
– прямолинейный подучасток, характеризуемый длиной;
– входной переходной подучасток (этот подучасток характеризуется постоянной скоростью поворота переднего приведенного колеса тягача);круговой подучасток заданного радиуса ;
– выходной переходной подучасток (этот подучасток, как и входной, характеризуется постоянной скоростью поворота переднего приведенного колеса тягача).
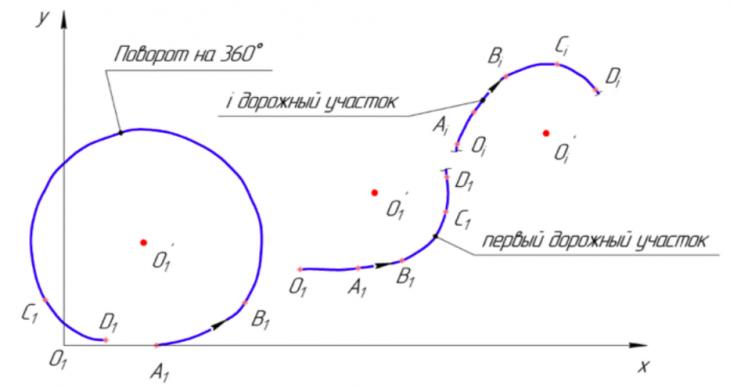
Рисунок 5 – Дорожные участки:
– прямолинейный подучасток; – входной переходной подучасток; – круговой подучасток;
– выходной переходной подучасток; – центр поворота на iкруговом подучастке
Заключение
Описанная модель криволинейного движения точки сцепления полуприцепа и тягача позволяет оценить с точностью ±5% степень отклонения траектории полуприцепа.
Траектория плоского криволинейного движения смоделирована простыми участками.
Определена модель динамики движения при прохождении криволинейного участка поворота.
Сложные участки движения поделены на участки, описываемые простыми геометрическими законами.
Практическая реализация разработанного алгоритма построениягеометрии движения специальных транспортных средств показала рациональность и перспективность данного подхода к проблеме определения степени отклонения траектории полуприцепа специального транспортного средства. Этот подход позволяет объективно выявить основные геометрические характеристики движения многозвенного специального транспортного средства и может быть положен в основу разработки системы автоматизации управления движением тягача и полуприцепа.
Библиография
1. Гладов Г.И., Петренко А.М. Специальные транспортные средства: Теория: Учеб. для вузов. / Под ред. Г.И. Гладова. – М.: ИКЦ «Академкнига», 2006. – 215 с.
2. Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет. / Под общ. ред. Б.Н.Белоусова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. – 728 с.
3. Иванина Н.Л., Головченко В.И. Автоматизированный расчет и построение габаритной полосы движения длиннобазных седельных автопоездов при их поворотах на 90° и 180°. – Вісник НТУ «ХПІ». – 2013. – № 1 (975). – С. 48 – 64.
4. Лычин М.Т., Жилейкин М.М. Разработка принципов повышения маневренности длиннобазных многоосных автопоездов с полуприцепами. Известия высших учебных заведений. Машиностроение. #11 [692] 2017,-36 с.
5. Маланин В.В., Аюпов В.В. К вопросу о классификации научных работ по исследованию движения автопоезда с позиций системного подхода.-Деп. в НИИНавтопром, 1981, № Д580.-12 с.
6. Павлов В.А. Исследование поворотливости многозвенного прицепного автопоезда.-Дисс. канд. техн. наук, М., 1968.-172с.
7. Kuprikov, M., Rabinskiy, L.N., Influence of infrastructure constraints on the geomet-rical layout of a long-haul aircraft Journal of Mechanical Engineering Research and De-velopments 2018 41(4), с. 40-45
8. Kuprikov, M., Rabinskiy, L.N., Vertical take-off and landing aircrafts: Myth or reali-ty of modern aviation, Journal of Mechanical Engineering Research and Developments 2018 41(4), с. 46-52
9. L. Markin. Discrete geometric models in problems of automated assembling of ob-jects. IOP Conference Series: Materials Science and Engineering (MSE)", vol. 451, 2018, №012124 URL: http://iopscience.iop.org/article/10.1088/1757899X/451/1 /012124/pdf
References
1. Gladov G.I., Petrenko A.M. Spetsial'nye transportnye sredstva: Teoriya: Ucheb. dlya vuzov. / Pod red. G.I. Gladova. – M.: IKTs «Akademkniga», 2006. – 215 s.
2. Belousov B.N., Popov S.D. Kolesnye transportnye sredstva osobo bol'shoi gruzopod''emnosti. Konstruktsiya. Teoriya. Raschet. / Pod obshch. red. B.N.Belousova. – M.: Izd-vo MGTU im. N.E. Baumana, 2006. – 728 s.
3. Ivanina N.L., Golovchenko V.I. Avtomatizirovannyi raschet i postroenie gabaritnoi polosy dvizheniya dlinnobaznykh sedel'nykh avtopoezdov pri ikh povorotakh na 90° i 180°. – Vіsnik NTU «KhPІ». – 2013. – № 1 (975). – S. 48 – 64.
4. Lychin M.T., Zhileikin M.M. Razrabotka printsipov povysheniya manevrennosti dlinnobaznykh mnogoosnykh avtopoezdov s polupritsepami. Izvestiya vysshikh uchebnykh zavedenii. Mashinostroenie. #11 [692] 2017,-36 s.
5. Malanin V.V., Ayupov V.V. K voprosu o klassifikatsii nauchnykh rabot po issledovaniyu dvizheniya avtopoezda s pozitsii sistemnogo podkhoda.-Dep. v NIINavtoprom, 1981, № D580.-12 s.
6. Pavlov V.A. Issledovanie povorotlivosti mnogozvennogo pritsepnogo avtopoezda.-Diss. kand. tekhn. nauk, M., 1968.-172s.
7. Kuprikov, M., Rabinskiy, L.N., Influence of infrastructure constraints on the geomet-rical layout of a long-haul aircraft Journal of Mechanical Engineering Research and De-velopments 2018 41(4), s. 40-45
8. Kuprikov, M., Rabinskiy, L.N., Vertical take-off and landing aircrafts: Myth or reali-ty of modern aviation, Journal of Mechanical Engineering Research and Developments 2018 41(4), s. 46-52
9. L. Markin. Discrete geometric models in problems of automated assembling of ob-jects. IOP Conference Series: Materials Science and Engineering (MSE)", vol. 451, 2018, №012124 URL: http://iopscience.iop.org/article/10.1088/1757899X/451/1 /012124/pdf
Результаты процедуры рецензирования статьи
В связи с политикой двойного слепого рецензирования личность рецензента не раскрывается.
Со списком рецензентов издательства можно ознакомиться здесь.
Предмет исследования – алгоритм построения и визуализации математической модели геометрии движения многозвенных специальных транспортных средств (автопоездов).
Методология исследования основана на сочетании теоретического и модельного подходов с применением методов анализа, алгоритмизации, программирования, обобщения, сравнения, синтеза.
Актуальность исследования активным развитием автомобильного транспорта в различных областях современной экономики и, соответственно, необходимостью изучения, моделирования и визуализации геометрии их движения (в том числе многозвенных специальных транспортных средств / автопоездов).
Научная новизна связана с разработкой автором модели криволинейного движения точки сцепления полуприцепа и тягача, которая позволяет оценить степень отклонения траектории полуприцепа с точностью ± 5 %, позволяет учесть основные геометрические характеристики движения многозвенного специального транспортного средства и может быть положена в основу разработки системы автоматизации управления движением тягача и полуприцепа.
Стиль изложения научный. Статья написана русским литературным языком.
Структура рукописи включает следующие разделы: Введение (разработка алгоритма построения движения специальных транспортных средств, основные концепции, направления развития и назначение специальных транспортных средств, развитие системных средств в построении геометрии движения агрегатов, современное состояние метрологического обеспечения специальных транспортных средств, тенденции развития колесных средств, пути построения процесса проектирования и разработана общая архитектура движения модели многозвенного специального транспортного средства), Постановка задачи (Разработка алгоритма геометрического моделирования специальных транспортных средств, алгоритм построения и визуализации геометрической модели специальных транспортных средств, требования, заложенные в техническом задании, проектирование конструкции как процесс принятия технических решений, исходные данные для проектирования, формирование первичного облика, формирование компоновочной схемы, расчёт характеристик специальных транспортных средств, расчёт характеристик эффективности функционирования, методы определения показателей – экспериментальный, расчетный, экспертный, формирование технического предложения, Математическая модель движения многозвенного специального транспортного средства, определение зависимостей между углами поворота колес звеньев специальных транспортных средств, ширина коридора, углы поворота управляемых колес, переднее и заднее приведенное колесо тягача, приведенное колесо полуприцепа, уравнения, описывающие процесс поворота многозвенного специального транспортного средства, допущения, семейство многозвенных специальных транспортных средств, предназначенное для транспортировки длинномерных неделимых грузов массой до 300 т по дорогам V категории (СНиП П-Д.5-72), схема седельных автопоездов, программный комплекс, дорожные участки), Заключение (выводы), Библиография.
Выделение раздела «Постановка задачи» не представляется целесообразным. При таком разделении текста основное содержание статьи попадает в данный раздел, что не верно. Желательно также (учитывая тематику журнала «Программные системы и вычислительные методы») выделить пункт, посвящённый описанию создания и функционирования программного комплекса.
Текст включает шесть рисунков. Рисунки следует размещать непосредственно после первого упоминания. Изображение на рисунке 1 практически не читается.
Содержание в целом соответствует названию. Вместе с тем формулировка заголовка, возможно, нуждается в корректировке. Речь идёт не только об алгоритме, но и о программном комплексе для построения геометрии движения специальных транспортных средств. При этом в качестве примера рассмотрено семейство многозвенных специальных транспортных средств, предназначенное для транспортировки длинномерных неделимых грузов массой до 300 т по дорогам V категории (СНиП П-Д.5-72). Необходимо указать программные средства, на основе которых создан программный комплекс, а также привести сравнение характеристик данного комплекса с известными аналогами. Также не ясно, на основании каких расчётов сделан вывод о том, что «Описанная модель криволинейного движения точки сцепления полуприцепа и тягача позволяет оценить с точностью ±5 % степень отклонения траектории полуприцепа». В целом обсуждение результатов следует расширить – как по объёму, так и по содержанию.
Библиография включает девять источников отечественных авторов – монографии, научные статьи, диссертации, учебные пособия. Библиографические описания некоторых источников нуждаются в корректировке в соответствии с ГОСТ и требованиями редакции, например:
1. Гладов Г. И., Петренко А. М. Специальные транспортные средства: Теория : учеб. для вузов. / под ред. Г. И. Гладова. – М.: Академкнига, 2006. – 215 с.
3. Иванина Н. Л., Головченко В. И. Автоматизированный расчет и построение габаритной полосы движения длиннобазных седельных автопоездов при их поворотах на 90° и 180° // Вісник НТУ «ХПІ». – 2013. – № 1 (975). – С. 48–64.
4. Лычин М. Т., Жилейкин М. М. Разработка принципов повышения маневренности длиннобазных многоосных автопоездов с полуприцепами // Известия высших учебных заведений. Машиностроение. – 2017. – № 11 (692). – С. ???–???.
6. Павлов В. А. Исследование поворотливости многозвенного прицепного автопоезда : дис. … канд. техн. Наук. – М., 1968. – 172 с.
7. Kuprikov M., Rabinskiy L. N., Influence of infrastructure constraints on the geometrical layout of a long-haul aircraft // Journal of Mechanical Engineering Research and Developments. – 2018. – Vol. 41. – № 4. – Р. 40–45.
9. Markin L. Discrete geometric models in problems of automated assembling of objects // IOP Conference Series: Materials Science and Engineering. – 2018. – Vol. 451. – № 012124. – URL: http://iopscience.iop.org/article/10.1088/1757899X/451/1 /012124/pdf.
В библиографическом списке желательно отразить охранные документы (авторские свидетельства, патенты) по теме статьи.
Апелляция к оппонентам (Гладов Г. И., Петренко А. М., Белоусов Б. Н., Попов С. Д., Иванина Н. Л., Головченко В. И., Лычин М. Т., Жилейкин М. М., Маланин В. В., Аюпов В. В., Павлов В. А., Kuprikov M., Rabinskiy L. N., Markin L.) имеет место.
В целом рукопись соответствует основным требованиям, предъявляемым к научным статьям. Материал представляет интерес для читательской аудитории и после доработки может быть опубликован в журналах «Программные системы и вычислительные методы», «Транспортный вестник».
|