|
ГЛАВНАЯ
> Вернуться к содержанию
Кибернетика и программирование
Правильная ссылка на статью:
Кревецкий А.В., Чесноков С.Е.
Распознавание частично маскированных групповых точечных объектов по наиболее схожим локальным описаниям их формы
// Кибернетика и программирование.
2016. № 6.
С. 30-37.
DOI: 10.7256/2306-4196.2016.6.21445 URL: https://nbpublish.com/library_read_article.php?id=21445
Распознавание частично маскированных групповых точечных объектов по наиболее схожим локальным описаниям их формы
Кревецкий Александр Владимирович
кандидат технических наук
заведующий, Поволжский государственный технологический университет
424000, Россия, Республика Марий Эл, г. Йошкар-Ола, пл. Ленина, 3
Krevetsky Aleksander Vladimirovich
PhD in Technical Science
Head of the Department of Computer Science, Volga State University of Technology
424000, Russia, Marii El, g. Yoshkar-Ola, pl. Lenina, 3

|
krevetskyav@volgatech.net
|
|
 |
Другие публикации этого автора
|
|
|
Чесноков Сергей Евгеньевич
кандидат технических наук
доцент, кафедра информатики, Поволжский государственный технологический университет
424000, Россия, Республика Марий Эл, г. Йошкар-Ола, пл. Ленина, 3, оф. кафедра информатики
Chesnokov Sergei Evgen'evich
PhD in Technical Science
Associate Professor, Department of Computer Science, Volga State University of Technology
424000, Russia, respublika Marii El, g. Ioshkar-Ola, pl. Lenina, 3, of. kafedra informatiki
|
|
shesnokov@gmail.com
|
|
 |
|
DOI: 10.7256/2306-4196.2016.6.21445
Дата направления статьи в редакцию:
14-12-2016
Дата публикации:
21-12-2016
Аннотация:
Групповые точечные объекты (ГТО) представляют собой множества изолированных контрастных к фону точечных отметок, объединенных некоторым общим признаком. Во многих приложениях в качестве устойчивого признака выступает форма взаимного располо-жения точечных объектов группы. Применение известных методов распознавания формы ГТО становится проблематичным, когда в поле зрения наблюдателя попадает лишь часть ГТО одного из известных классов. Возможные отклонения точечных объектов от своих эта-лонных положений дополнительно усложняют задачу распознавания частично маскирован-ных ГТО. В работе исследуется распознавание ГТО по наиболее схожим с эталонными локаль-ным описаниям конфигурации соседних элементов ГТО. В качестве локальных описаний используются цилиндрические сечения абстрактного векторного поля с источниками в элементах ГТО и ограниченным масштабом дальнодействия. Локальные описания конфигурации ГТО представляются дискретным комплекснозначным кодом. Модуль и аргумент каждого отсчета соответствуют силе и направлению действия векторного поля. Мера схожести на основе модуля скалярного произведения таких описаний формы обеспечивает инвариантность к ракурсу наблюдения ГТО и не зависит от смещения ГТО в кадре. Характеристики распознавания подтверждают эффективность рассмотренного метода распознавания частично маскированных ГТО в значимом для практики диапазоне случайных флуктуаций координат элементов ГТО.
Ключевые слова:
Групповой точечный объект, ассоциированный сплошной образ, точечные поля, распознавание групповых объектов, анализ точечных сцен, пространственная компактность, векторное поле, цилиндрические сечения поля, инвариантность к повороту, комплекснозначное кодирование
УДК: 004.931
Работа выполнена при финансовой поддержке РФФИ, проект № 16-01-00451
Abstract: Group point objects (GPO) are multitudes of isolated background-contrasting dots united by one common feature. Many apps use a method of mutual arrangement of group point objects. Implementation of well-known methods for recognizing GPOs gets difficult when an observer has only part of GPOs constituting one of famous classes within his or her sight. Possible deviations of point objects from their standard positions additionally complicate the task to recognize partially marked GPOs. In their research the authors perform recognition of GPOs based on most similar local description of configuration with adjacent elements of GPOs. Cylindrical sections of the abstract vector field with sources in GPO elements and restricted scale of long-range interaction are used as local descriptions. Local descriptions of GPO configuration are viewed as discrete complex-valued codes. The module and argument of each reference correspond to the strength and direction of the vector field action. Similarity of such description of forms on the basis of the dot product module ensures invariance to GPO observation angle and does not depend on GPO shift in picture. Recognition features prove efficiency of the reviewed method for recognizing partially masked GPOs in a practically significant scope of random fluctuations in GPO element coordinates.
Keywords: group point object, associate solid image, point field, recognition of group objects, analysis of point scenes, spatial compactness, vector field, cylindrical section of the field, invariance to rotation, complex coding
Введение
Во многих приложениях систем технического зрения представляют интерес группы объектов, соизмеримых с элементами разрешения регистрируемых изображений [1]. Точечные и малоразмерные объекты объединяются в множества с использованием различных признаков, например, яркостных, цветовых, по пространственной близости и др. Такие множества приобретают групповые признаки — становятся групповыми точечными объектами (ГТО). Групповые признаки обладают большей устойчивостью к действию мешающих факторов (шумам, помехам), по сравнению с признаками отдельных малоразмерных объектов, и имеют большую информативность для задач «понимания» изображений.
Примерами ГТО служат локационные изображения строев, потоков и скоплений техники, строений, опор линий электропередач [2], ориентиры в виде созвездий небесной сферы [3-5]. изображения выборочных реализаций случайных процессов в признаковом пространстве [6]. ГТО могут быть получены на основе изображений, состоящих из крупноразмерных объектов. Объекты заменяются точками в центрах тяжести или характерными точками для упрощенного описания их взаимного положения или формы [7].
Выделение групповых признаков связано с предварительным обнаружением ГТО [8] в зашумленной сцене и сегментации ГТО. Результатом выделения признаков является их представление (кодирование), во многом определяющее свойства соответствующего признакового пространства. На основе анализа кодов вторичных описаний наблюдаемого ГТО и ГТО известных классов организуется процесс распознавания ГТО.
Наиболее информативным признаком распознавания ГТО во многих прикладных задачах служит форма взаимного расположения ГТО. Эффективные подходы распознавания формы ГТО базируются на связывании изолированных элементов ГТО в ассоциированный сплошной образ [1, 5, 8] с последующим анализом его формы методами контурного анализа [8].
В ситуациях, когда в поле зрения датчика изображения находится лишь часть ГТО, использование таких подходов невозможно, поскольку нарушается гипотеза о том, что наблюдаемый образ представляет собой зашумленную копию эталонного образа одного из известных классов.
В работе исследуется решение задачи распознавания частично маскированных ГТО путем анализа локальных описаний формы ГТО, отражающих в большей степени конфигурации соседних элементов и в меньшей степени – более удаленных.
Модель локальных описаний конфигурации ГТО отсчетами векторного поля
Для целей настоящей статьи примем, что задачи обнаружения отдельных точечных и малоразмерных объектов на фоне крупноразмерных объектов решены [2]. Будем также считать, что решена задача обнаружения пространственно компактных скоплений этих объектов [9, 10], а результаты обнаружения предъявлены в виде множества
 , ,  , (1) , (1)
из N точечных отметок с координатами  и яркостями и яркостями  . .
Данное множество можно представить в виде изображения на плоскости
 , ,  , (2) , (2)
где  – множество допустимых значений координат – множество допустимых значений координат  в наблюдаемом изображении – точечной сцене, в наблюдаемом изображении – точечной сцене,  – символ Кронекера или дельта-функция в зависимости от дискретного или непрерывного случая соответственно. В общем случае эта сцена содержит ложные отметки – символ Кронекера или дельта-функция в зависимости от дискретного или непрерывного случая соответственно. В общем случае эта сцена содержит ложные отметки  и обнаруженные отметки ГТО и обнаруженные отметки ГТО  некоторого класса m из M заранее известных. некоторого класса m из M заранее известных.
Введем отображение точечной сцены (1,2) в кумулятивное векторное поле
 , ,  , (3) , (3)
в котором предполагается, что каждая точечная отметка является источником абстрактного поля с пространственным распределением силы
 , (4) , (4)
пропорциональной яркости отметки , масштабным параметром r и направлением действия
 . (5) . (5)
Очевидно, что распределение потенциала и направления действия такого поля однозначно связаны с конфигурацией расположения точечных отметок.
Поставим в соответствие каждому точечному объекту  , ,  , локальное описание конфигурации ГТО в виде множества из K отсчетов векторного поля (3), расположенных по окружности радиуса r0, взятых с равным угловым шагом. , локальное описание конфигурации ГТО в виде множества из K отсчетов векторного поля (3), расположенных по окружности радиуса r0, взятых с равным угловым шагом.
 , (6) , (6)
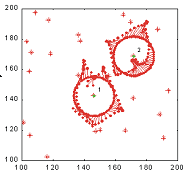
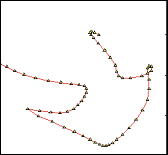
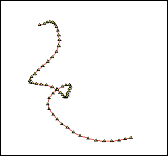
Множество таких комплекснозначных отсчетов представляет собой дискретный комплексный сигнал, к которому применимы известные типовые преобразования и методы обработки [11]. На рис. 1 приведен пример точечной сцены и изображений таких сигналов для двух точечных объектов сцены. На рис. 1,а отсчеты (6) изображены в виде векторов с началом в местах взятия отсчетов, а на рис. 1,б,в — в виде вектор-контуров [8] с цепным кодом на комплексной плоскости.
|
а
|
б
|
в
|
|
Рис. 1. Примеры локальных описаний конфигурации ГТО.
|
Количество отсчетов в таком сигнале может, как и при определении шага дискретизации временных сигналов, выбираться с учетом ширины их спектров Фурье по теореме Котельникова.
Распознавание ГТО по локальным описаниям формы
Сформированные по рассмотренной методике вектор-контуры представимы как точки или векторы в K-мерном признаковом унитарном пространстве CK. Предполагается, что искаженные координатными шумами и помехами наблюдаемые вектор-контуры образуют в этом пространстве кластеры вокруг эталонных центров. При таком допущении в качестве меры схожести вектор-контуров используется расстояние между точками этого пространства, а в качестве критерия распознавания может использоваться минимум расстояния в признаковом пространстве.
Пусть на этапе обучения для ГТО каждого класса сформированы по L эталонных (в отсутствие шумов и помех) локальных описаний конфигурации ГТО
 , ,   , (7) , (7)
а для наблюдаемой точечной сцены множество
 , ,  (8) (8)
таких описаний.
Для удобства дальнейших рассуждений представим все искажения вектор-контуров, вызванные флуктуациями координат элементов ГТО и ошибками их обнаружения, аддитивной моделью
 , (9) , (9)
где  – шумовой вектор-контур, – шумовой вектор-контур,  – угловое рассогласование эталонного и наблюдаемого изображений ГТО, – угловое рассогласование эталонного и наблюдаемого изображений ГТО,  – циклический сдвиг начальной точки контура, – циклический сдвиг начальной точки контура,
 (10) (10)
— повернутый и циклически сдвинутый код эталонного вектор-контура.
Тогда оптимальный по критерию минимального расстояния алгоритм распознавания заключается в нахождении в пространстве CK ближайшего к Z множества Um:
 , (11) , (11)
 , ,
 , ,
где  — функция расстояния в признаковом пространстве CK, — функция расстояния в признаковом пространстве CK,  — циклически смещенный код эталонного вектор-контура с номером l у ГТО m-го класса, — циклически смещенный код эталонного вектор-контура с номером l у ГТО m-го класса,
 (12) (12)
— модуль скалярного произведения вектор-контуров, * — символ комплексного сопряжения. Модуль скалярного произведения инвариантен к угловому рассогласованию участвующих в нем вектор-контуров. В работе [11] показано как происходит перераспределение энергии между действительной и мнимой составляющими скалярного произведения в пространстве CK при взаимном развороте контуров и что при отсутствии рассогласования модуль совпадает с действительной частью скалярного произведения вектор-контуров, которое используется в классическом выражении для расстояния между векторами в унитарном пространстве. Такая же величина получается при подстановке в выражение для скалярного произведения оценки максимального правдоподобия углового рассогласования двух вектор-контуров.
Оценка эффективности распознавания ГТО
Оценка эффективности распознавания частично маскированных ГТО по наиболее схожему локальному описанию конфигурации ГТО проводилась путем статистических испытаний программных реализаций полученных алгоритмов на ЭВМ.
В качестве эталонных ГТО брались случайные реализации двумерного пуассоновского потока точек с заданной плотностью p и соответствующим этой плотности средним расстоянием между соседними точками rp (средняя длина ребра минимального остовного дерева ГТО). Видимая часть наблюдаемого ГТО формировалась геометрическими преобразованиями смещения и поворота эталонного ГТО соответствующего класса. Флуктуации координат точечных объектов моделировались по независимому центрированному двумерному нормальному закону со среднеквадратическим отклонением σ по каждой координатной оси.
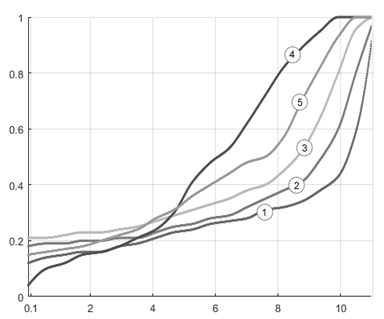
На рис. 2 приведены характеристики распознавания ГТО в виде зависимости вероятности правильного распознавания P от величины, характеризующей относительный уровень координатных шумов  , при различных масштабных параметрах ядерной функции векторного поля (4). Графики № 1, 2, 3, 4, 5 получены при соответствующих значениях декремента затухания , при различных масштабных параметрах ядерной функции векторного поля (4). Графики № 1, 2, 3, 4, 5 получены при соответствующих значениях декремента затухания  . .
Рис. 2. Характеристики распознавания ГТО
На данном этапе исследований яркости точечных объектов не учитывались и принимались равными, ложные отметки и пропуски полезных отсутствовали, маскировалась половина площади, занимаемой ГТО, смещением за поле зрения кадра. Радиус цилиндрических сечений векторного поля согласовывался с плотностью точек ГТО соотношением  . Это значение выбиралось из компромиссных соображений увеличения охвата областей влияния большего числа соседних элементов ГТО и снижения влияния краевых эффектов [12] у границ кадра наблюдаемого изображения. Эксперименты проводились для числа распознаваемых классов ГТО M=5. . Это значение выбиралось из компромиссных соображений увеличения охвата областей влияния большего числа соседних элементов ГТО и снижения влияния краевых эффектов [12] у границ кадра наблюдаемого изображения. Эксперименты проводились для числа распознаваемых классов ГТО M=5.
Из анализа данных зависимостей следует, что существует некоторый оптимальный масштаб ядерной функции поля (4), при котором пороговое СКО координатных шумов достигает 1/8 от среднего расстояния между соседними элементами ГТО для вероятности правильного распознавания P>0.8.
Заключение
При распознавании групповых точечных объектов в большинстве приложений наиболее информативным признаком выступает форма взаимного расположения точечных объектов группы. Применение известных методов распознавания формы ГТО становится проблематичным, когда в поле зрения наблюдателя попадает лишь часть ГТО одного из известных классов. Возможные флуктуации точечных объектов от своих эталонных положений дополнительно усложняют задачу распознавания частично маскированных ГТО.
Использование признаков формы для распознавания частично маскированных ГТО возможно, если использовать не полное, а локальные описания конфигурации соседних элементов ГТО. В качестве локальных описаний предлагается использовать дискретизированные цилиндрические сечения абстрактного кумулятивного векторного поля с источниками в элементах ГТО и ограниченным масштабом дальнодействия. Модуль и аргумент каждого отсчета таких дискретных комплексных кодов соответствуют силе и направлению действия векторного поля. Мера схожести на основе модуля скалярного произведения таких описаний формы обеспечивает инвариантность к ракурсу наблюдения ГТО и не зависит от смещения ГТО в кадре.
Полученные на данном этапе исследований характеристики распознавания подтверждают эффективность рассмотренного метода распознавания частично маскированных ГТО в значимом для практики диапазоне случайных флуктуаций координат элементов ГТО.
В дальнейшем планируется провести исследования по оптимизации радиуса цилиндрических сечений векторного поля, оценить устойчивость метода распознавания к ложным отметкам и пропускам элементов ГТО на этапе обнаружения, исследовать избирательность метода при различном числе распознаваемых классов.
По предварительным данным повышение характеристик распознавания возможно также за счет сокращения числа сопоставляемых локальных описаний конфигурации ГТО путем предварительной их селекции, например по критерию сложности формы, неравномерности спектра Фурье.
Библиография
1. Точечные поля и групповые объекты / Я. А. Фурман, А. А Роженцов, Р. Г. Хафизов, Д. Г. Хафизов, А. В. Кревецкий, Р. В. Ерусланов; под общ. ред. Я. А. Фурмана. – М: ФИЗМАТЛИТ, 2014. – 440 с.
2. Верба В.С. Обнаружение наземных объектов. Радиолокационные системы обнаружения и наведения воздушного базирования. – М.: Радиотехника, 2007. – 360 с.
3. Бурый А.С., Михайлов С.Н. Методы идентификации астроориентиров в задачах ориентации и навигации космического аппарата по изображениям звездного неба // Зарубежная радиоэлектроника. – №7-8, 1994. – С.44-52.
4. Анисимов В.В., Курганов В.Д., Злобин В.К. Распознавание и цифровая обработка изображений. – М.: Высш. шк., 1983. – 295 с.
5. Кревецкий А.В. Обработка изображений в системах ориентации летательных аппаратов.-Йошкар-Ола: Изд-во МарГТУ, 1998. – 149 с.
6. Мандель И. Д. Кластерный анализ. – М.: Финансы и статистика, 1988. – 176 с.
7. Цифровая обработка видеоизображений / А.А. Лукъяница, А.Г.Шишкин. – М.: «Ай-Эс-Эс Пресс», 2009. – 518 с.
8. Введение в контурный анализ; приложения к обработке изображений и сигналов / Я.А. Фурман, А.В. Кревецкий, А.К. Передреев, и др.; под ред. Я.А. Фурмана. – 2-е изд. – М.: ФИЗМАТЛИТ, 2003. – 592 с.
9. Кревецкий А.В. Инвариантные к форме обнаружение и пространственная локализация групп точечных объектов в трехмерном пространстве // Вестник МарГТУ. Радиотехнические и инфокоммуникационные системы. – Йошкар-Ола: Изд-во МарГТУ, 2011.– №1. – С. 47-53.
10. Ипатов Ю.А., Кревецкий А.В. Методы обнаружения и пространственной локализации групп точечных объектов // Кибернетика и программирование. – 2014. – № 6. – С.17-25.
11. Комплекснозначные и гиперкомплексные системы в задачах обработки многомерных сигналов / Я.А. Фурман, А.В. Кревецкий, А.А. Роженцов, и др.; под ред. Я.А. Фурмана. – М.: ФИЗМАТЛИТ, 2004. – 456 с.
12. Кревецкий А.В., Чесноков С.Е. Кодирование и распознавание изображений множеств точечных объектов на основе моделей физических полей // Автометрия, 2002. – №3. – С. 80–89.
References
1. Tochechnye polya i gruppovye ob''ekty / Ya. A. Furman, A. A Rozhentsov, R. G. Khafizov, D. G. Khafizov, A. V. Krevetskii, R. V. Eruslanov; pod obshch. red. Ya. A. Furmana. – M: FIZMATLIT, 2014. – 440 s.
2. Verba V.S. Obnaruzhenie nazemnykh ob''ektov. Radiolokatsionnye sistemy obnaruzheniya i navedeniya vozdushnogo bazirovaniya. – M.: Radiotekhnika, 2007. – 360 s.
3. Buryi A.S., Mikhailov S.N. Metody identifikatsii astroorientirov v zadachakh orientatsii i navigatsii kosmicheskogo apparata po izobrazheniyam zvezdnogo neba // Zarubezhnaya radioelektronika. – №7-8, 1994. – S.44-52.
4. Anisimov V.V., Kurganov V.D., Zlobin V.K. Raspoznavanie i tsifrovaya obrabotka izobrazhenii. – M.: Vyssh. shk., 1983. – 295 s.
5. Krevetskii A.V. Obrabotka izobrazhenii v sistemakh orientatsii letatel'nykh apparatov.-Ioshkar-Ola: Izd-vo MarGTU, 1998. – 149 s.
6. Mandel' I. D. Klasternyi analiz. – M.: Finansy i statistika, 1988. – 176 s.
7. Tsifrovaya obrabotka videoizobrazhenii / A.A. Luk''yanitsa, A.G.Shishkin. – M.: «Ai-Es-Es Press», 2009. – 518 s.
8. Vvedenie v konturnyi analiz; prilozheniya k obrabotke izobrazhenii i signalov / Ya.A. Furman, A.V. Krevetskii, A.K. Peredreev, i dr.; pod red. Ya.A. Furmana. – 2-e izd. – M.: FIZMATLIT, 2003. – 592 s.
9. Krevetskii A.V. Invariantnye k forme obnaruzhenie i prostranstvennaya lokalizatsiya grupp tochechnykh ob''ektov v trekhmernom prostranstve // Vestnik MarGTU. Radiotekhnicheskie i infokommunikatsionnye sistemy. – Ioshkar-Ola: Izd-vo MarGTU, 2011.– №1. – S. 47-53.
10. Ipatov Yu.A., Krevetskii A.V. Metody obnaruzheniya i prostranstvennoi lokalizatsii grupp tochechnykh ob''ektov // Kibernetika i programmirovanie. – 2014. – № 6. – S.17-25.
11. Kompleksnoznachnye i giperkompleksnye sistemy v zadachakh obrabotki mnogomernykh signalov / Ya.A. Furman, A.V. Krevetskii, A.A. Rozhentsov, i dr.; pod red. Ya.A. Furmana. – M.: FIZMATLIT, 2004. – 456 s.
12. Krevetskii A.V., Chesnokov S.E. Kodirovanie i raspoznavanie izobrazhenii mnozhestv tochechnykh ob''ektov na osnove modelei fizicheskikh polei // Avtometriya, 2002. – №3. – S. 80–89.
Ссылка на эту статью
Просто выделите и скопируйте ссылку на эту статью в буфер обмена. Вы можете также
попробовать найти похожие
статьи
|
|