|
ГЛАВНАЯ
> Вернуться к содержанию
Электроника и электротехника
Правильная ссылка на статью:
Лукьянов А.Д., Горянина К.И., Фам Д.Т.
Идентификация параметров преобразующей системы MEMS - акселерометра ADXL-345 методом наименьших квадратов
// Электроника и электротехника.
2016. № 2.
С. 171-179.
DOI: 10.7256/2453-8884.2016.2.21242 URL: https://nbpublish.com/library_read_article.php?id=21242
Идентификация параметров преобразующей системы MEMS - акселерометра ADXL-345 методом наименьших квадратов
Лукьянов Александр Дмитриевич
кандидат технических наук
доцент, заведующий, кафедра "Автоматизация производственных процессов", Донской государственный технический университет
344000, Россия, Ростовская область, г. Ростов-на-Дону, пл. Гагарина, 1, корп. 6, каб. 6-401
Lukyanov Alexander Dmitrievich
PhD in Technical Science
Associate professor at the Department of production processes automation of Don State Technical University
344000, Russia, Rostov-on-Don, pl.Gagarina, 1, building 6, office 6-401

|
alexlukjanov1998@gmail.com
|
|
 |
Горянина Ксения Игоревна
техник, кафедра "Автоматизация производственных процессов", Донской государственный технический университет
344000, Россия, Ростовская область, г. Ростов-на-Дону, пл. Гагарина, 1, корп. 6, оф. 6-401
Goryanina Kseniya Igorevna
Engineer at the Department of Production Processes Automation of Don State Technical University
344000, Russia, Rostov-on-Don, pl. Gagarina, 1, building 6, office 6-401
|
|
gorianina.k@yandex.ru
|
|
 |
|
Фам Динь Тунг
доктор технических наук
заведующий, кафедра "Технология и авиакосмическое оборудование", Вьетнамский технический университет им. Ле Куй Дон
100000, Вьетнам, г. Ханой, ул. Хоанг Куок Вьет, 236
Fam Din Tung
Doctor of Technical Science
Head of the Department of Technology and Aerospace Equipment of Le Quy Don Technical University of Vietnam
236 Hoang Quoc Viet Street, Bac Tu Liem District, Hanoi, Vietnam
|
|
phamdinhtung@mail.ru
|
|
 |
|
DOI: 10.7256/2453-8884.2016.2.21242
Дата направления статьи в редакцию:
28-11-2016
Дата публикации:
15-01-2017
Аннотация:
Предметом исследования является проблема обеспечения точности измерений, осуществляемых с помощью малогабаритных MEMS-акселерометров для целей ориентации, навигации и мониторинга. Объектом исследования является преобразующая система сенсоров 3х-осевых MEMS-акселерометров, а также сопряженные с ней мехатронные и электромеханические преобразователи, влияющие на точность и вносящие погрешности в измеряемые сигналы. Рассмотрены статические погрешности, приводящие к сдвигу нуля и отклонению коэффициентов усиления по различным каналам. Погрешности представлены в виде эллипсоида чувствительности акселерометра. Для идентификации параметров эллипсоида чувствительности акселерометра применен стохастический подход и использован линейный метод наименьших квадратов, с помощью которого по облаку точек оценивались величины полуосей трехосного эллипсоида. Новизну исследования составляет стохастическая постановка задачи оценки параметров чувствительности эллипсоида акселерометра по облаку экспериментальных точек. Кроме этого, новизной обладает постановка вопроса и исследование возможности оценки параметров эллипсоида чувствительности с помощью МНК по неполному облаку экспериментальных точек, покрывающему только часть квадрантов эллипсоида чувствительности.
Ключевые слова:
идентификация параметров, метод наименьших квадратов, калибровка, MEMS, акселерометр, эллипсоид чувствительности, точность, сдвиг нуля, 3х-осевой датчки, мехатроника
Abstract: The subject of the research is the issue of ensuring the accuracy of measurements made with the help of small-sized MEMS-accelerometer for the purposes of orientation, navigation and monitoring. The object of the study is a transformation system of sensors of triaxial MEMS-accelerometers and the related mechatronic and electromechanical transducers, affecting the accuracy and introducing errors to the measured signals. The authors consider static errors, causing zero shift and gain errors in different channels. The errors are presented in the form of accelerometer response ellipsoid.To identify the parameters of accelerometer response ellipsoid, the authors apply the stochastic approach and the linear least squares method; using this method, the authors assess the size of the semiaxis of the triaxial ellipsoid. The novelty of this study consists in the stochastic formulation of the problem of the accelerometer response ellipsoid parameters assessment on the base of the cloud of experimental points. Besides, the problem and the study of the possibility to assess the response ellipsoid parameters using the least squares method on the base of a reduced cloud of experimental points, covering only the part of the response ellipsoid quadrants, is also of a great scientific interest.
Keywords: parameters identification, least squares method, calibration, MEMS, accelerometer, response ellipsoid, accuracy, zero shift, triaxial sensor, mechatronics
Введение.
В настоящее время миниатюрные MEMS акселерометры, магнитометры и гироскопы заслуженно завоевали популярность в системах ориентации и управления различных мобильных объектов [1]. При этом вопросы повышения точности и стабильности показаний подобных датчиков приобретают первостепенное значение [2, 3]. Погрешности, возникающие при измерении ускорения MEMS – акселерометрами, можно разделить на имеющие динамическую природу (и возникающие в процессе измерения динамически меняющихся ускорений) и статические, связанные с несовершенством конструкции преобразующей системы MEMS датчика или ошибками калибровки. Вопросам моделирования и анализа динамических погрешностей, в том числе – определению резонансов, посвящен ряд работ [5, 6]. В то же время, представляется актуальным разработка статистически значимой процедуры идентификации статических характеристик преобразующей системы MEMS – акселерометров.
Модель упругой преобразующей системы 3-х осевого акселерометра.
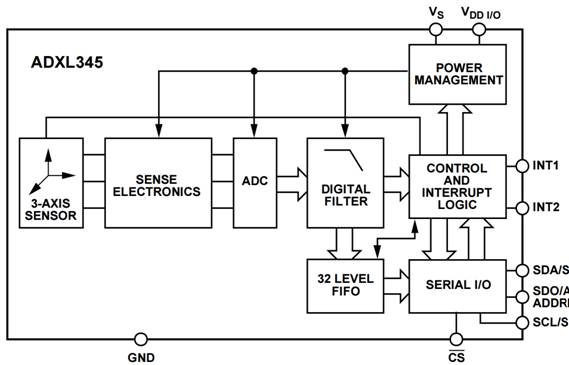
Рассмотрим типичную конструкцию MEMS-акселерометра на примере 3-х осевого акселерометра ADXL-345. Функциональная схема акселерометра приведена на рис.1
|
|
|
Рисунок 1. Функциональная схема акселерометра ADXL-345 (по материалам [4])
|
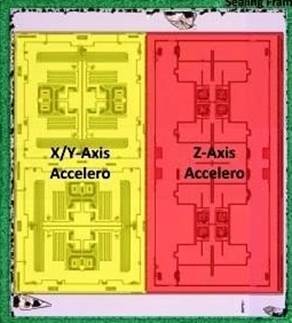
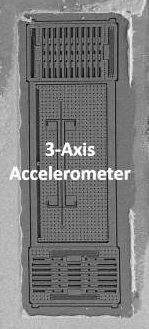
Главным источником статических погрешностей измерений является 3-х осевой чувствительный элемент, представляющий собой микромеханическую структуру. К сожалению, в открытых источниках не удалось найти микрофотографий чувствительного сенсора данного акселерометра, однако сенсоры конкурирующих производителей, как правило, состоят из трех независимых чувствительных элементов с взаимно перпендикулярными осями чувствительности, сформированными на одном основании (рис. 2). Такая конструкция сенсора (в отличие от сенсора с тремя степенями свободы [5]) позволяет исключить взаимовлияние чувствительных элементов, возникающих на перпендикулярных каналах при одноосевом смещении инерционного элемента. Данный факт позволить существенным образом упростить процедуру идентификации параметров 3D-акселерометра.
|
|
|
|
«а»
|
«б»
|
|
Рисунок 2. 3D - cенсоры MEMS акселерометров: «а» - MPU-9250; «б» - ST LSM9DS0. По материалам [7]
|
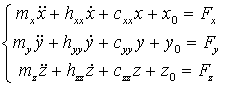
Таким образом, рассматриваем модель преобразующей системы акселерометра как систему из трех независимых инерционных элемента, установленных на общем основании и имеющих только по одной степени свободы во взаимно-перпендикулярных направлениях. Такая система описывается следующей системой дифференциальных уравнений:
|
|
(1)
|
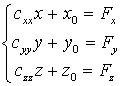
Для анализа статических характеристик, система уравнений (1) вырождается в систему уравнений статики:
|
|
(3)
|
Процедура калибровки подобной системы (определение значений смещения нулей  , ,  , ,  и коэффициентов усиления и коэффициентов усиления  , ,  , ,  ) описана достаточно хорошо как в руководствах, предоставляемых производителями [3*, 4*, 8*], так и в работах независимых авторов [9*, 10*]. Например, в работе [9*] ) описана достаточно хорошо как в руководствах, предоставляемых производителями [3*, 4*, 8*], так и в работах независимых авторов [9*, 10*]. Например, в работе [9*]
рассматривается вопрос определения матрицы корректирующих коэффициентов для данного датчика по результатам четырех измерений при взаимно-перпендикулярной ориентации силы тяжести (например, когда вектор силы тяжести направлен в сторону векторов  , ,  , ,  , ,  ). Применение данного подхода на практике, к сожалению, не всегда дает хороший результат. Например, использование ориентаций акселерометра в сторону векторов ). Применение данного подхода на практике, к сожалению, не всегда дает хороший результат. Например, использование ориентаций акселерометра в сторону векторов  , ,  ,приводит к показаниям, отличным от величины ускорения свободного падения ,приводит к показаниям, отличным от величины ускорения свободного падения  . Кроме того, данная процедура осуществляет коррекцию без статистического усреднения результатов измерений, что также отрицательно сказывается на ее точности. . Кроме того, данная процедура осуществляет коррекцию без статистического усреднения результатов измерений, что также отрицательно сказывается на ее точности.
Также известна методика калибровки акселерометра по каждой из осей отдельно, не учитывающая взаимовлияние подвеса [8*]. В этой работе предлагается, используя известное выражение для показаний акселерометра (рассматривается ось ):
|

|
(4)
|
провести измерения  для углов для углов  равных 0, равных 0,  , ,  , ,  , и определить поправочные коэффициенты , и определить поправочные коэффициенты  и и  как как
|

|
(5)
|
|

|
(6)
|
Безусловным достоинством данного подхода является его простота. Однако отсутствие статистической обработки данных в процессе расчета корректирующих коэффициентов может приводить к значительным ошибкам. Кроме этого, как упоминалось ранее, не учитывается ситуация возможного поворота собственных осей базы акселерометра относительно осей , , прибора.
Постановка задачи калибровки MEMS-акселерометра в стохастической формулировке.
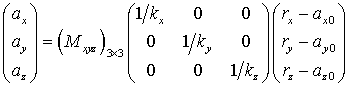
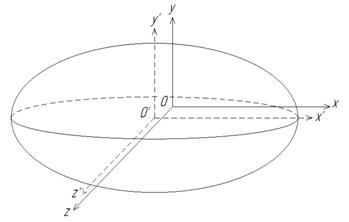
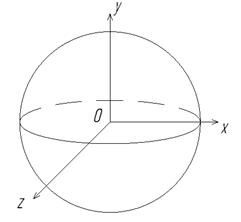
Рассматривая стохастическую интерпретацию процедуры идентификации погрешностей, присущих акселерометру, удобно отталкиваться от концепции «эллипсоида чувствительности», когда реакция акселерометра на эталонное ускорение (ускорение свободного падения  ) в зависимости от угла ориентации платформы, представляется как точка в трехмерном пространстве. Облако точек, в случае идеальной калибровки акселерометра, должно образовывать сферу (рис. 3 «а»), однако в реальном случае, из-за наличия смещения нуля, различных коэффициентов усиления по осям, а также возможного поворота платформы, облако точек образует трехосный эллипсоид (рис. 3 «б»). Таким образом, задачей калибровки становится определение коэффициентов в уравнении преобразования эллипсоида в сферу [12]: ) в зависимости от угла ориентации платформы, представляется как точка в трехмерном пространстве. Облако точек, в случае идеальной калибровки акселерометра, должно образовывать сферу (рис. 3 «а»), однако в реальном случае, из-за наличия смещения нуля, различных коэффициентов усиления по осям, а также возможного поворота платформы, облако точек образует трехосный эллипсоид (рис. 3 «б»). Таким образом, задачей калибровки становится определение коэффициентов в уравнении преобразования эллипсоида в сферу [12]:
|
|
(7)
|
На первом этапе идентификации целесообразно разделить погрешности на погрешность угловой ориентации, погрешность смещения нуля и погрешность усиления по осям. Оценка погрешности смещения нуля, как правило, не представляет трудности, поэтому опустим ее из рассмотрения.
|
а
|
 б б
|
|
Рис. 2 Поверхности чувствительности калиброванного и не калиброванного акселерометра.
|
Погрешность ориентации может быть обнаружена по ориентации главных осей эллипсоида (в том числе – с помощью МНК), однако на данном этапе исследования также рассматриваться не будет.
Идентификация параметров эллипсоида чувствительности
Остановимся на процедуре идентификации коэффициентов усиления по осям акселерометра, что эквивалентно идентификации величин полуосей трехосного эллипсоида, задаваемого уравнением:
|
|
(8)
|
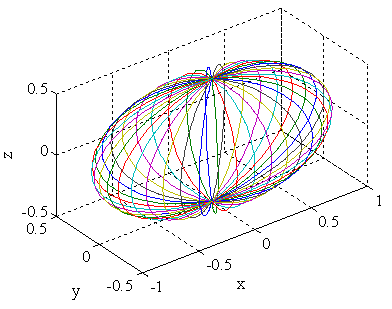
Согласно уравнению (8) сформируем облако точек на поверхности эллипсоида и визуализируем его (рис. 3). При этом зададим полуоси эллипсоида следующими величинами:  = 1.0, = 1.0,  = 0.5, = 0.5,  =0.5. Облако точек =0.5. Облако точек  описывается вектором размерностью описывается вектором размерностью  , где , где  - число точек в облаке. - число точек в облаке.
Стохастическая постановка задачи идентификации подразумевает формирование облака точек экспериментальных измерений, полученных в при повороте акселерометра на различные углы по всем трем осям.
|
|
|
Рис. 3. Визуализация эллипсоида чувствительности
|
В случае имитационного моделирования, сформируем имитацию облака точек экспериментальных измерений  по имеющемуся облаку точек «эталонного» эллипсоида, добавив к нему аддитивный белый шум различной интенсивности (0.05, 0.1, 0.4) и получив, соответственно облака точек по имеющемуся облаку точек «эталонного» эллипсоида, добавив к нему аддитивный белый шум различной интенсивности (0.05, 0.1, 0.4) и получив, соответственно облака точек  , ,  и и  . .
Задача идентификации полуосей эллипсоида может быть сформулирована как задача минимизации функционала  по параметрам , и : по параметрам , и :
|

|
(9)
|
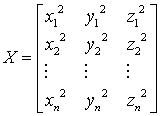
Вектор оценок, который сводит к минимуму сумму квадратов отклонений всех экспериментальных точек от теоретических, можно определить с помощью метода наименьших квадратов [11]:
где  - матрица объясняющих переменных; - матрица объясняющих переменных;  - вектор экспериментальных результатов (для данного случая – единичный вектор); - вектор экспериментальных результатов (для данного случая – единичный вектор);  - вектор оценок параметров. - вектор оценок параметров.
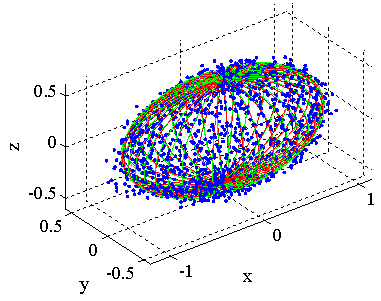
На рисунке 4 приведена визуализация облака точек на фоне эталонного эллипсоида. При расчетах использовался массив из 441 точки.
|
|
|
|
«а»
|
«б»
|
|
Рис. 4. Визуализация зашумленных точек на фоне эллипсоида чувствительности. «а» - полное облако точек, «б» - усеченное облако точек.
|
Таблица 1
Оценки полуосей эллипсоида для различного уровня шума, 441 точка
|
коэфф. шума
|

|

|

|
|
0.0
|
1
|
0.5
|
0.5
|
|
0.05
|
0.9991
|
0.5023
|
0.5034
|
|
0.1
|
1.0263
|
0.5021
|
0.5095
|
|
0.4
|
1.2448
|
0.6163
|
0.6461
|
Результаты моделирования представлены и в Табл. 1. В строках таблицы приведены оценки величин полуосей эллипсоида в зависимости от уровня шума, добавленного к координатам точек исходного эллипсоида. Результаты имитационного моделирования показывают, что для коэффициента шума порядка 0.1 метод дает приемлемую погрешность порядка 2-3%. Увеличение числа измерений будет снижать погрешность как  . .
Достаточно интересным для практике представляется случай идентификации при неполных данных, когда облако точек не покрывает все квадранты эллипсоида. Имитационно моделирование и идентификация подобного случая (отсутствует ) покрытие поверхности эллипсоида в полупространстве « », показало работоспособность метода (рисунок 4 «б»). Полученные оценки составили: = 1.0069, = 0.5119, = 0.5009, что соответствует по точности оценкам с полным облаком точек. », показало работоспособность метода (рисунок 4 «б»). Полученные оценки составили: = 1.0069, = 0.5119, = 0.5009, что соответствует по точности оценкам с полным облаком точек.
Заключение.
Рассмотренная процедура идентификации параметров эллипсоида чувствительности MEMS – акселерометра позволяет оценить параметры эллипсоида чувствительности, и на этой основе – осуществить коррекцию коэффициентов усиления чувствительного элемента по взаимно перпендикулярным осям. Показана возможность идентификации параметров эллипсоида по неполному облаку точек. В дальнейшем предполагается провести экспериментальную проверку метода на реальных MEMS-акселерометрах, а также продолжить исследование алгоритма идентификации на его устойчивость к неполным данным и его доработку для использования во встроенных устройствах.
Библиография
1. Syed Z. Design and implementation issues of a portable navigation system: PHD Thesis. Calgary, Canada: The University of Calgary, 2009. 230 p.
2. Повышение точности мобильной альтиметрии: [Электронный ресурс]. URL:http://tm.spbstu.ru/Повышение_точности_мобильной_альтиметрии (Дата доступа 18.11.2016)
3. Embedded navigation solution: Calibration // VectorNav. [Электронный ресурс]. URL: http://www.vectornav.com/support/library/calibration (Дата обращения 18.11.2016)
4. Axis, ±2g/±4g/±8g/±16g Digital Accelerometer ADXL345 Data Sheet. // Analog Devices, Inc. ©2009–2015. 24 с.
5. Vincas Benevicius, Vytautas Ostasevicius and Rimvydas Gaidys. Identification of Capacitive MEMS Accelerometer Structure Parameters for Human Body Dynamics Measurements. Sensors 2013, 13(9), 11184-11195; doi:10.3390/s130911184
6. Ostasevicius V.; Gaidys R.; Dauksevicius R. Numerical analysis of dynamic effects of a nonlinear vibro-impact process for enhancing the reliability of contact-type MEMS devices. Sensors 2009, 9, 10201–10216.
7. Apart: the big three axis of IMU explicates the internal structure / [Электронный ресурс]. URL: http://en.connbuy.com/newsinfo/3.html (Дата доступа 25.11.2016)
8. Christopher J. Fisher. Using an Accelerometer for Inclination Sensing. AN-1057 Application Note. Analog Devices. www.analog.com.
9. Определение угла наклона акселерометром / [Электронный ресурс] URL: http://bitaks.com/resources/inclinometer/content.html, (Дата доступа 25.11.2016)
10. Акселерометр ADXL345. Ч. 2 // [Электронный ресурс] URL: http://lobotryasy.net/accelerometer_adxl345_part_2.php. (Дата доступа 25.11.2016)
11. Лукьянов А.Д., Алексейчик М.И., Онойко Т.С. Идентификация динамической модели системы позиционирования ротора с использованием метода фиктивных переменных // Системы управления и информационные технологии. 2014. № 3.2(57). С. 204-209.
12. Jack Ganssle. A Designer's Guide to MEMS Sensors // Digi-Key Electronics. 2012. [Электронный ресурс] URL: http://www.digikey.com/en/articles/techzone/2012/jul/a-designers-guide-to-mems-sensors. (Дата доступа 25.11.2016)
13. Негольс А.В., Пискова А.В. Системы определения местонахождения // Кибернетика и программирование. 2013. № 4. C. 46-50. DOI: 10.7256/2306-4196.2013.4.9357. URL: http://www.e-notabene.ru/kp/article_9357.html
References
1. Syed Z. Design and implementation issues of a portable navigation system: PHD Thesis. Calgary, Canada: The University of Calgary, 2009. 230 p.
2. Povyshenie tochnosti mobil'noi al'timetrii: [Elektronnyi resurs]. URL:http://tm.spbstu.ru/Povyshenie_tochnosti_mobil'noi_al'timetrii (Data dostupa 18.11.2016)
3. Embedded navigation solution: Calibration // VectorNav. [Elektronnyi resurs]. URL: http://www.vectornav.com/support/library/calibration (Data obrashcheniya 18.11.2016)
4. Axis, ±2g/±4g/±8g/±16g Digital Accelerometer ADXL345 Data Sheet. // Analog Devices, Inc. ©2009–2015. 24 s.
5. Vincas Benevicius, Vytautas Ostasevicius and Rimvydas Gaidys. Identification of Capacitive MEMS Accelerometer Structure Parameters for Human Body Dynamics Measurements. Sensors 2013, 13(9), 11184-11195; doi:10.3390/s130911184
6. Ostasevicius V.; Gaidys R.; Dauksevicius R. Numerical analysis of dynamic effects of a nonlinear vibro-impact process for enhancing the reliability of contact-type MEMS devices. Sensors 2009, 9, 10201–10216.
7. Apart: the big three axis of IMU explicates the internal structure / [Elektronnyi resurs]. URL: http://en.connbuy.com/newsinfo/3.html (Data dostupa 25.11.2016)
8. Christopher J. Fisher. Using an Accelerometer for Inclination Sensing. AN-1057 Application Note. Analog Devices. www.analog.com.
9. Opredelenie ugla naklona akselerometrom / [Elektronnyi resurs] URL: http://bitaks.com/resources/inclinometer/content.html, (Data dostupa 25.11.2016)
10. Akselerometr ADXL345. Ch. 2 // [Elektronnyi resurs] URL: http://lobotryasy.net/accelerometer_adxl345_part_2.php. (Data dostupa 25.11.2016)
11. Luk'yanov A.D., Alekseichik M.I., Onoiko T.S. Identifikatsiya dinamicheskoi modeli sistemy pozitsionirovaniya rotora s ispol'zovaniem metoda fiktivnykh peremennykh // Sistemy upravleniya i informatsionnye tekhnologii. 2014. № 3.2(57). S. 204-209.
12. Jack Ganssle. A Designer's Guide to MEMS Sensors // Digi-Key Electronics. 2012. [Elektronnyi resurs] URL: http://www.digikey.com/en/articles/techzone/2012/jul/a-designers-guide-to-mems-sensors. (Data dostupa 25.11.2016)
13. Negol's A.V., Piskova A.V. Sistemy opredeleniya mestonakhozhdeniya // Kibernetika i programmirovanie. 2013. № 4. C. 46-50. DOI: 10.7256/2306-4196.2013.4.9357. URL: http://www.e-notabene.ru/kp/article_9357.html
Ссылка на эту статью
Просто выделите и скопируйте ссылку на эту статью в буфер обмена. Вы можете также
попробовать найти похожие
статьи
|
|



 ,
,  ,
,